Wäre es nicht toll …?

… wenn lokale Objekterkennung smarte Abläufe steuert?
Stell dir vor:
- Der Katzen-Türsteher: Deine Kamera erkennt im Garten deine Katze – und nur für sie entriegelt sich automatisch die Katzenklappe, während der Waschbär draußen bleiben muss.
- Der Post-Melder: Sobald der Postbote vor dem Briefkasten steht, erhältst du eine kurze Nachricht auf dein Handy, damit du weißt, dass die wichtige Lieferung da ist.
- Der Hof-Wächter: Dein Garagentor geht abends automatisch zu, wenn die KI erkennt, dass zwar dein Auto in der Einfahrt steht, du aber vergessen hast, das Tor zu schließen.
Wir bauen heute solch einen Wächter, der solche Aufgaben und weitere, ganz alleine schafft – also offline, ohne dass deine Daten dein Haus verlassen!
In meinem NPU-Beitrag Teil 1 habe ich das Raspberry Pi AI Kit bereits vorgestellt und die Hardware startklar gemacht.
Somit gehen wir heute den nächsten Schritt: Wir programmieren uns einen eigenen KI-Wächter.
Was wir brauchen (Die Hardware)
- Raspberry Pi (8 GB RAM)
- Kühler für RPi5
- Netzteil 5V 5A USB-C
- Raspberry Pi Kamera-Modul 3
- Hailo-8L NPU aus dem Raspberry Pi AI Kit
- NVMe M.2 Shield X1002 für RPi 5
- SD-Karte für RPi OS Debian Trixie Betriebssystem (64bit).
- LEDs, Relays 3,3v, Kabel, Breadborad…
Vorbereitung
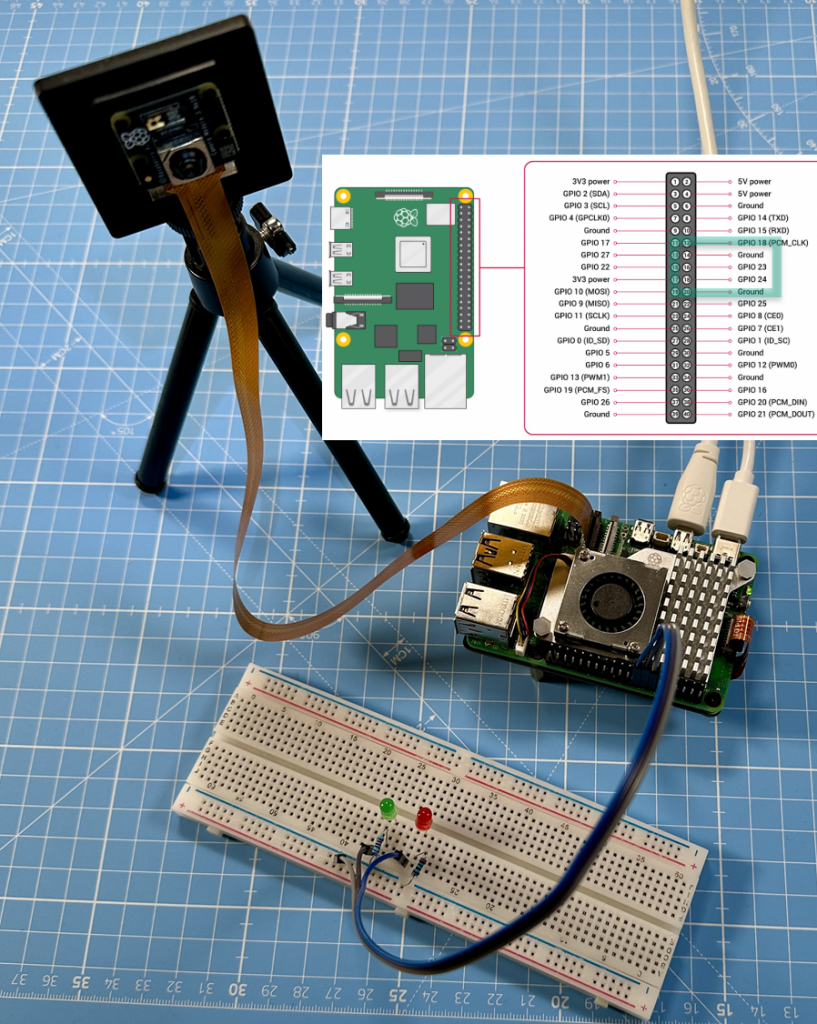
Bevor wir unseren KI-Wächter programmieren, muss dein Raspberry Pi sofern noch nicht geschehen ’schlau‘ gemacht werden. Wie das AI Kit mit der Hailo-NPU funktioniert, habe ich hier in diesem Beitrag Schritt für Schritt gezeigt. Damit die GPIO Anschlüsse nun auch genutzt werden können, bringe ich hierfür die NPU unterhalb des Raspberry an, wie im Video zu sehen ist.
1. SD‑Karte neu flashen (Raspberry Pi OS 64‑bit)
Für dieses Projekt habe ich Raspberry Pi OS Version Trixie 64‑bit verwendet.
- Raspberry Pi Imager starten
- Gerät: Raspberry Pi 5
- OS: Raspberry Pi OS (64‑bit) Debian Trixie
- Optional: WLAN, Hostname, SSH konfigurieren
- Flashen → SD‑Karte einlegen → Booten
Nach dem ersten Start System updaten:
sudo apt update sudo apt full-upgrade -y sudo reboot
2. Firmware & Bootloader aktualisieren
Damit PCIe und Kamera sauber laufen:
sudo rpi-eeprom-update -a sudo reboot
3. PCIe Gen3 für das AI‑Kit über raspi-config aktivieren
Das M.2‑HAT+ Shield nutzt PCIe, aber standardmäßig nur Generation 2 und die Hailo NPU profitiert massiv davon, wenn auf Gen3 umgestellt wird.
Unter Trixie findest du die Option hier:
sudo raspi-config → Advanced Options → PCIe Speed → Gen 3`
Speichern → Neustart
4. Hailo‑Software installieren
Die offiziellen Pakete kommen direkt aus den Raspberry‑Pi‑Repos.
sudo apt update sudo apt install dkms sudo apt install hailo-all rpicam-apps -y sudo reboot
Dieses Metapaket werden damit installiert:
- Firmware
- Kernel‑Treiber (DKMS)
- HailoRT
- Tools (
hailortcli) - rpicam-apps (optimierte Post-Processing-Skripte für Gesichtserkennung)
5. Funktionstest der NPU
Nach dem Reboot:
hailortcli fw-control identify
Erwartete Ausgabe: Hailo‑8L, PCIe, FW‑Version …
6. Kamera testen
Camera Module 3:
rpicam-hello
Wenn ein Live‑Bild erscheint, ist der komplette libcamera‑Stack korrekt.
7. Optional: Hailo Apps Infrastructure integrieren
Für die im Teil 1 gezeigten Tests
git clone https://github.com/hailo-ai/hailo-apps-infra.git cd hailo-apps-infra sudo ./scripts/cleanup_installation.sh sudo ./install.sh
8. Prüfen, ob die NPU korrekt initialisiert wurde
Bevor du Pipelines testest, muss die NPU sauber laufen.
In der Hailo‑Umgebung sind Pipelines komplette Verarbeitungsketten für KI‑Modelle. Sie verbinden mehrere Schritte zu einem durchgehenden Ablauf:
- Laden des Modells
- Vorverarbeitung der Kameradaten
- Ausführung der Inferenz (Anwenden des Gelernten) auf der NPU
- Postprocessing (das Postprocessing sorgt dafür, dass diese Ergebnisse verständlich, gefiltert und nutzbar werden. Beispiele: Bounding Boxes, Labels, Scores)
- Ausgabe an die Anwendung oder das Terminal
Eine Pipeline ist also nicht nur ein einzelner Befehl, sondern ein vollständiger KI‑Workflow, der auf der NPU läuft.
hailortcli fw-control identify
Wenn du eine Ausgabe wie „Hailo‑8L / Firmware Version …“ siehst, ist der Treiber aktiv und die Firmware geladen.
9. Kamera‑Stack testen (Pflicht vor jeder Pipeline)
Die rpicam‑Apps sind die Basis für alle Vision‑Pipelines. Nochmal testen
rpicam-hello
Wenn ein Live‑Bild erscheint, ist der komplette libcamera‑Stack korrekt eingerichtet
10: Das „KI-Gehirn“ installieren
Wir benutzen eine Software namens TensorFlow Lite. Das ist eine Version von Googles KI, die extra klein und schnell ist, damit sie auf dem Raspberry Pi läuft.
Tippe diesen Befehl ein, um die Erkennungs-Software zu laden:
sudo apt install python3-tflite-runtime
python3‑tflite‑runtime ist die kleine, schnelle KI‑Engine, die in unserem Projekt das YOLOv8‑Modell lädt und ausführt. Die Hailo‑NPU beschleunigt diese Berechnungen erheblich – aber ohne TFLite könnte der Raspberry Pi das Modell überhaupt nicht interpretieren oder nutzen.
Hintergrundwissen: Wie die KI in diesem Projekt eigentlich arbeitet
Bevor wir im nächsten Schritt den Python‑Code starten, lohnt sich ein kurzer Blick darauf, wie die KI im Hintergrund denkt. Das ist kein Pflichtwissen, aber es hilft zu verstehen, warum der Wächter so zuverlässig funktioniert.
Wie ein KI‑Modell lernt
Ein KI‑Modell lernt ähnlich wie ein Kind: Sieht ein Kind viele Bilder von Katzen, erkennt es irgendwann typische Merkmale wie Ohren, Fellmuster oder Schnurrhaare.
Genauso lernt ein Modell, indem es sehr viele Beispielbilder sieht und daraus Muster ableitet.
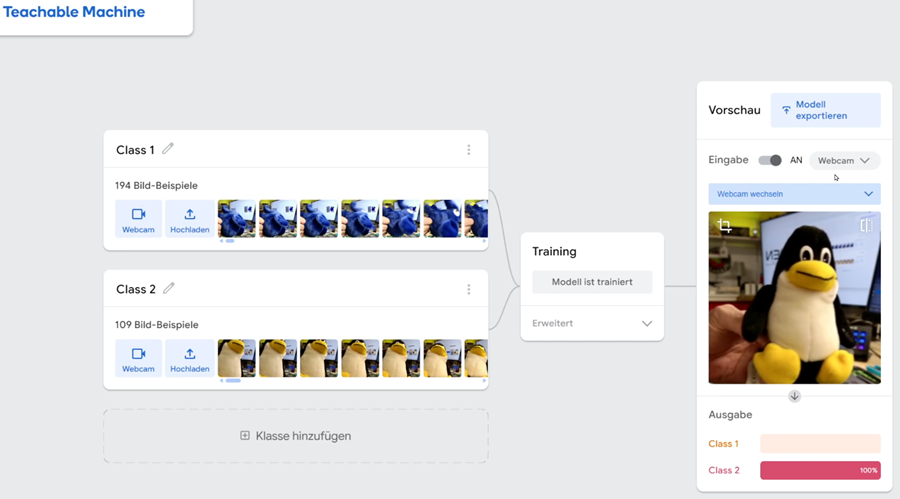
Eigene Modelle mit Teachable Machine
Mit Tools wie Teachable Machine kann man solche Modelle selbst trainieren – zum Beispiel, um zwischen deiner eigenen Katze und fremden Katzen zu unterscheiden. Man fotografiert das Objekt aus verschiedenen Blickwinkeln, und daraus entsteht ein kleines „Gehirn“, das später Bilder klassifiziert.
Warum hier YOLOv8 genutzt wird
Für den Haustür‑Wächter verwenden wir ein bereits fertig trainiertes Modell: YOLOv8, das auf der Hailo‑NPU läuft. Dieses Modell erkennt viele Objekte sofort – Menschen, Tiere, Pakete, Fahrzeuge und vieles mehr.
Die Kamera liefert das Bild, YOLOv8 analysiert es, und der Raspberry Pi entscheidet anschließend, was passieren soll.
Kombination: YOLO für Erkennung + Teachable Machine für Feinklassifikation
Man kann beide Ansätze auch kombinieren:
- YOLOv8 (Hailo) erkennt zuerst das Objekt, z. B. „Katze“.
- Ein selbst trainiertes Teachable‑Machine‑Modell kann dann den erkannten Bildausschnitt genauer einordnen – etwa ob es deine Katze ist oder ein fremdes Tier.
So bleibt die Erkennung schnell (dank Hailo‑NPU), während du trotzdem sehr individuelle Regeln umsetzen kannst.
11: Der Code (Der Türwächter-Plan)
Wir schreiben ein kleines Programm in der Sprache Python. Das Programm macht folgendes:
- Die Kamera liefert ein Bild.
- Das Bild wird an das KI‑Modell Yolov8 übergeben.
- python3‑tflite‑runtime führt das Modell aus – entweder komplett auf der CPU oder (in deinem Fall) teilweise über die Hailo‑NPU.
- Das Modell gibt Erkennungen zurück (z. B. „person“, „cat“, „cup“).
- Dein Python‑Code reagiert darauf (LED an, Relais schalten usw.).
Wichtig für den Datenschutz: Das Programm speichert das Bild nicht im Internet. Es schaut es sich kurz an, entscheidet und „vergisst“ es dann wieder. Das nennt man Edge Computing (Rechnen am Rand des Netzwerks).
Python-Code:
import subprocess import RPi.GPIO as GPIO import time import os import select # --- KONFIGURATION --- PIN_MENSCH = 23 # Rote LED PIN_GLAS = 24 # Grüne LED MODEL_JSON = '/usr/share/rpi-camera-assets/hailo_yolov8_inference.json' # Wie lange soll die LED nachleuchten (in Sekunden)? HALTEZEIT = 2.0 # --- HARDWARE SETUP --- GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False) GPIO.setup(PIN_MENSCH, GPIO.OUT) GPIO.setup(PIN_GLAS, GPIO.OUT) GPIO.output(PIN_MENSCH, GPIO.LOW) GPIO.output(PIN_GLAS, GPIO.LOW) # Variablen für die Zeitsteuerung letzter_mensch = 0 letztes_glas = 0 print("--- KI WÄCHTER GESTARTET ---") # --- KI PROZESS STARTEN --- cmd = [ 'rpicam-hello', '-t', '0', '--post-process-file', MODEL_JSON, '--viewfinder-width', '640', '--viewfinder-height', '640', '--verbose', '2', '--output', '-' ] process = subprocess.Popen( cmd, stdout=subprocess.PIPE, stderr=subprocess.STDOUT, text=True, bufsize=1 ) print("Suche aktiv... Die LEDs schalten automatisch ab, wenn nichts gesuchtes im Bild ist.") try: while True: # Schau nach, ob neue Daten von der KI da sind (Wartezeit 0.1 Sek) r, _, _ = select.select([process.stdout], [], [], 0.1) if r: line = process.stdout.readline() if not line: break line_clean = line.lower().strip() if "person" in line_clean: print("Ein Person erkannt!") letzter_mensch = time.time() GPIO.output(PIN_MENSCH, GPIO.HIGH) elif "cup" in line_clean: print("Glas wurde erkannt!") letztes_glas = time.time() GPIO.output(PIN_GLAS, GPIO.HIGH) # --- ABSCHALT-LOGIK --- aktuelle_zeit = time.time() # Wenn die letzte Erkennung länger her ist als die HALTEZEIT, LED aus if aktuelle_zeit - letzter_mensch > HALTEZEIT: GPIO.output(PIN_MENSCH, GPIO.LOW) if aktuelle_zeit - letztes_glas > HALTEZEIT: GPIO.output(PIN_GLAS, GPIO.LOW) except KeyboardInterrupt: print("\nAbbruch durch Nutzer.") finally: process.terminate() GPIO.cleanup() print("Beendet.")
12: Der finale Test
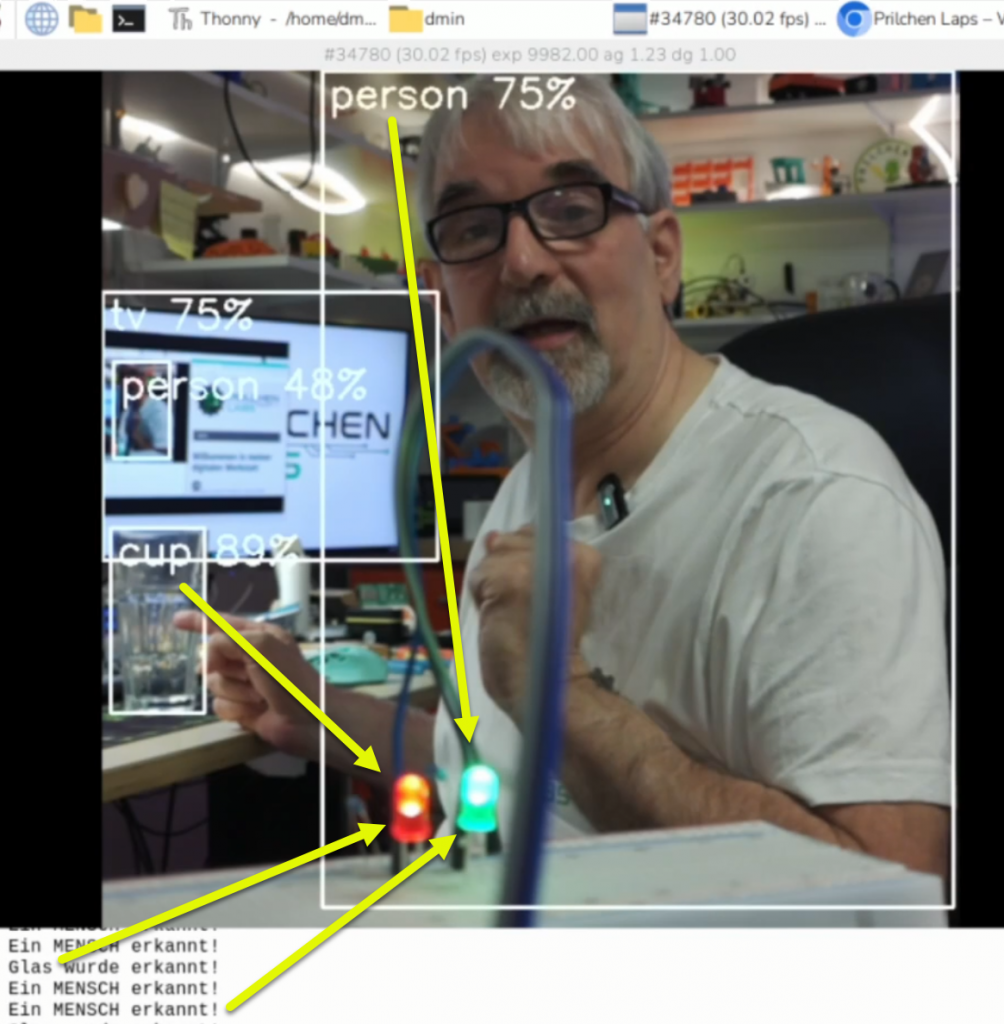
Wie in dem Video zu sehen, leuchtet die grüne LED wenn ich im Bild bin, zusätzlich auch die rote LED wenn auch das Wasserglas zu sehen ist und diese gehen auch wieder aus wenn die Objekte verdeckt oder abwesend ist.
Weitere Objekte werden bestimmt bei euch in der Auswertung gezeigt. Passt den Code nun für euch passen an oder erweitert diesen.
Jetzt könnte man statt LED auch ein 3,3V Relay verwenden der Motoren, Servos oder sonstige Anschlüsse steuert.
- Welche Objekte soll der Raspberry Pi für dich suchen?
- Was für Lösungen habt ihr damit vor umzusetzen? – Schreibt es in die Youtube-Video Kommentare.
Youtube-Video:
Update: Nicht im Video zu sehen
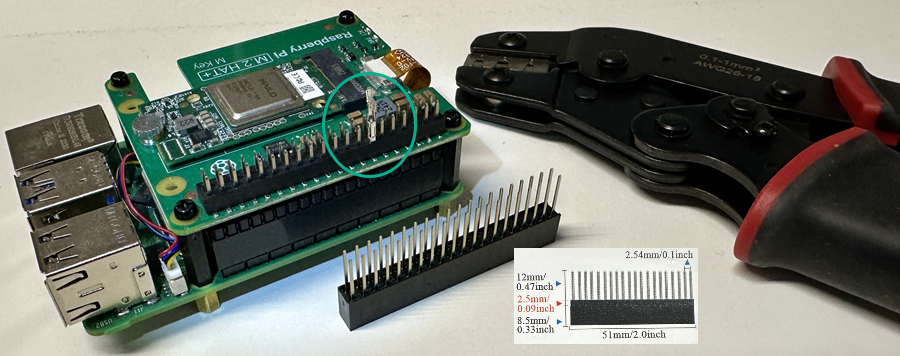
Alternative zum umbau mit Shield Bottom Base, wenn die neue Hailo-8L NPU mit 13 / 26 Tops Computing Power, die ja direkt mit dem Shield verlöteten ist, zum Einsatz kommen soll, dann mit diesen 12mm langen GPIO Verlängerungsadapter. Diese sind nicht optimal lang, haben jedoch noch eine abgreifbare Pin Länge. Hier Beispiel mit Dupont Buchsen-Stifte aus Crimpzange Set, sitzt gut und fest. Siehe Bild: