
Mit Softwarelösung RoboPro 4.2 problemlos zum laufen bekommen.
Und diesmal auch keine Probleme mit dem Prellen (mechanisch ausgelöster Störeffekt) gehabt.
Hier kamen Encoder Motoren zum Einsatz, somit konnte auf den Punkt genau gestartet und gestoppt werden.
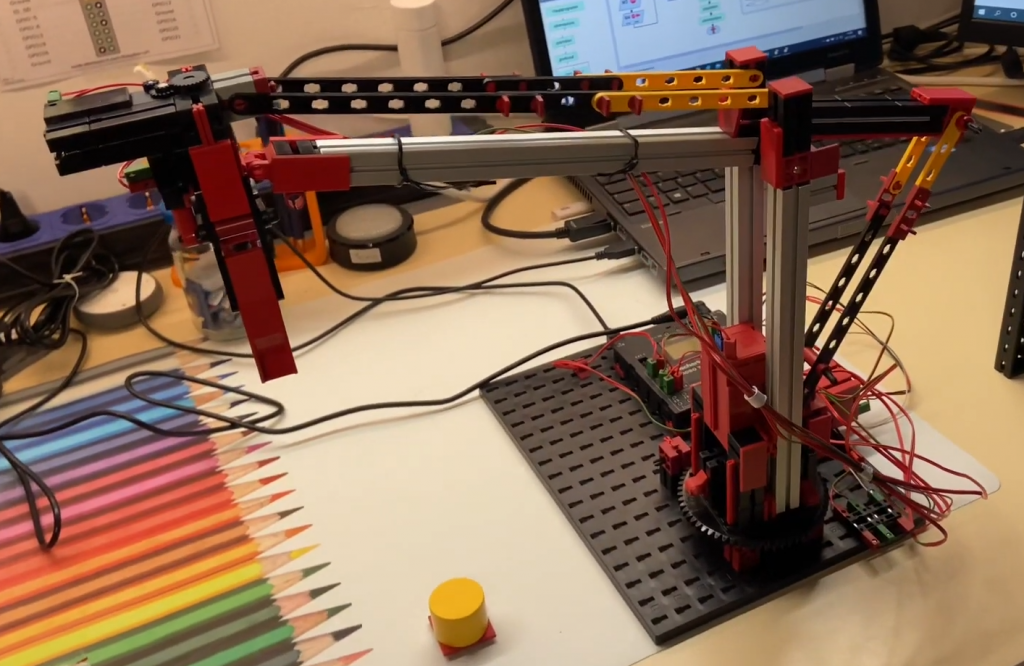
Aus der Box Automation Robots für TXT Controller mit vorhandenen TX umgesetzt.
Youtube-Video: