
Simulation eines automatisierten Fördersystems.
Erstellt mit dem Bausatz fischertechnik Automation Robots, bei dem vorausgesetzt wird, das schon ein TXT Controller vorhanden ist.
Hier die aufgebaute Lösung für die Einlagerung in ein Hochregal,
automatisiert mit dem schon in die Tage gekommenen „TX“ Controller.
Entwicklungsumgebung ist die Anwendung Robo Pro 4.6 für Windows.
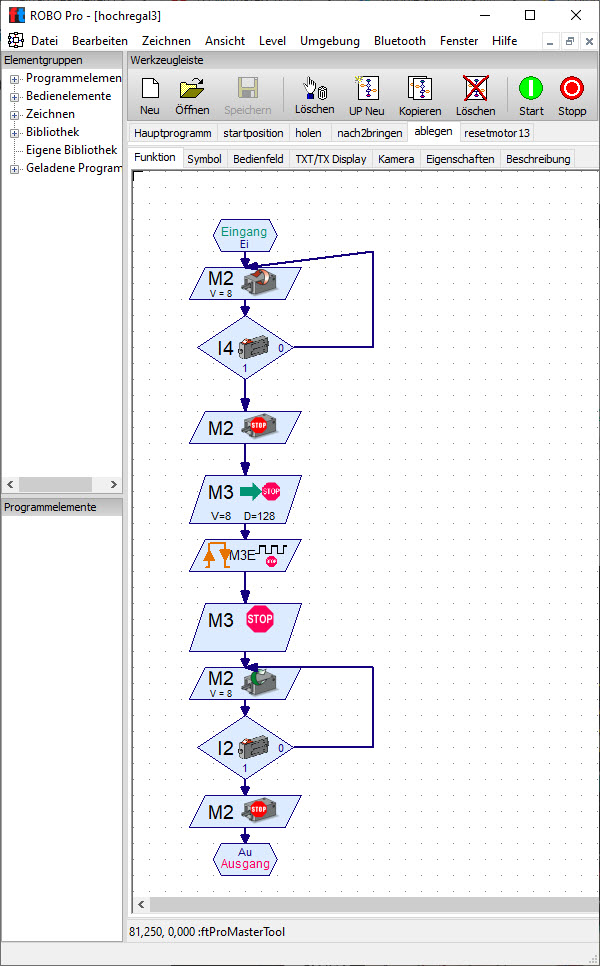
Die X und die Z-Achse werden mit Encodermotoren (fischertechnik 153422) präzise gesteuert, da diese 75 Impulse pro Umdrehung an den Controller senden.
Die Y- Achse wird mit einem einfachen Elektromotor angetrieben, der mit zwei Anstoßtastern seine Stoppunkte findet.